


还在迷信“双足人形”?多形态机器人才是未来主流
当下,双足人形机器人已然成为科技秀场无可争议的“顶流”。一次利落的后空翻、一段流畅的机械舞,甚至只是稳稳递出一杯咖啡的简单动作,便能在社交平台引发广泛传播与热议。
这种高频曝光正悄然塑造着大众的认知:未来的智能世界,似乎注定要被这些外形与行为高度拟人化的机器人主宰;仿佛只有拥有类人肢体、能说会动的机器人,才配称得上是“具身智能”在物理世界的终极形态。

然而,回归技术本质与产业落地的现实逻辑,我们必须清醒地认识到:具身智能的核心价值,从来不是让其载体高度拟人,而是赋予其智能的“大脑”,并能通过适配的物理形态解决现实世界的问题。未来机器人产业的核心,将是多形态机器人协同作业。双足人形机器人绝非一统天下的唯一主角。
01
破除迷思:具身智能的本质,与“人形”无关
首先必须明确,具身智能的实现,并不以高度拟人化为前提。
具身智能的核心逻辑,是具身载体与物理世界的智能交互,也就是通过与环境、物体、人类的实时互动,实现自主感知、认知决策与动作执行。它的关键能力由三部分构成:
🔷环境感知:依托视觉、听觉、触觉等多维传感器,理解复杂、动态的真实物理环境。
🔷自主决策:基于大模型与强化学习等技术,理解人类自然语言指令并转化为具体的可执行的动作序列。
🔷物理交互:以物理“身体”执行任务,作用于现实世界。
从内涵便可清晰看出,具身智能天然兼容多元形态的载体。无论是六轴工业机器人、协作机器人、四足机器人、人形机器人,还是其他各类智能装备,都可以成为具身智能的物理载体。人形机器人只是其中一种重要实现形式,而绝非唯一答案,更不是终极形态。
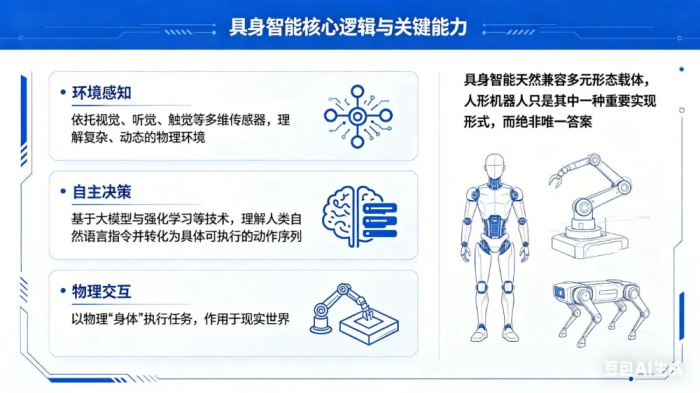
具身智能核心逻辑与关键能力(图源:AI生成)
更进一步来看,机器人形态之争的背后,本质是“创世论”与“进化论”两种不同技术哲学的碰撞:
“创世论”认为只要把单一形态做到极致、全能,就能通吃所有场景,解决所有问题。这种观点带有强烈的工程师浪漫主义色彩,试图“创造”一个万能的技术生命体,而人形机器人正是这一理念下被推崇的“通用形态”。
“进化论”则主张机器人应像自然界的生命一样,依据不同环境与场景需求不断分化和演化出不同形态。没有任何一种形态是预设的终极答案,最终成败由大规模应用下的数据、成本、效率与场景适配度来共同决定。
从商业化落地与技术演化的真实路径判断,“进化论”显然更务实,也更可行。这也从底层决定了:多形态协同才是未来机器人产业的主流方向。
此外,不可回避的是,当前双足人形机器人自身仍存在诸多难以突破的瓶颈与短板,这也注定了其难以成为覆盖全场景、解决所有问题的终极答案。
02
认清现实:双足人形机器人的优势与短板
双足人形机器人的核心优势,在于高度拟人化的肢体结构,能天然适配人类生活与工作环境,理论上可完成行走、抓取、精细操作等复杂任务,被视为机器人从“专用”迈向“通用”的理想载体。但回归现实,未来机器人产业绝不会是双足人形机器人的“独角戏”。

双足人形机器人(图源:优必选)
尽管当前多个品牌的双足人形机器人产品已经展现出亮眼的跑、跳、翻跟斗等运动能力。然而,这些能力仅局限于舞台表演等展示性场景,在工业、物流、服务等各类实际应用场景中缺乏足够的实用价值。
真正决定机器人能否规模化落地的,是自主控制、自主学习与深度人机交互等核心能力,而目前双足人形机器人在这些关键维度仍存在明显瓶颈:
🔷在控制与决策上,许多公开展示中,双足人形机器人的精彩表现与流畅动作,往往依赖于后台操作员的“遥控”或高度预设的程序,在复杂非结构化环境中难以实现完全的自主决策,难以有效应对突发状况。
🔷在学习训练上,双足人形机器人的自主学习能力薄弱,高度依赖大规模真机训练与海量数据采集,隐性成本高,严重制约规模化推广。
🔷在人机交互上,双足人形机器人的交互水平大多停留在简单的语音问答阶段,无法理解深层意图、识别复杂肢体语言,更难以建立情感连接,难以胜任家庭陪护、高端服务等深度交互场景。
除此之外,成本、效率与精度更是绕不开的现实困境。精密关节、控制系统研发与整机制造等带来高成本,推高大规模商业化落地的门槛。而追求“通用”的设计思路,在专业任务中反而成为劣势——在效率、精度与可靠性上,远不及专用机器人。
03
回归理性:多形态机器人协同才是未来主流
机器人的核心价值,是解决实际问题,而非刻意模仿人类。
人类社会场景多元,生产制造、物流仓储、家庭服务、应急救援等不同领域,对机器人的功能需求截然不同,这就注定需要形态各异、功能专精的机器人各司其职、协同配合,形成高效的智能网络。这才是未来机器人产业发展的主流方向。
例如,在工业场景中,多形态机器人早已成熟落地、各擅胜场:
🔷六轴工业机器人凭借高刚性、高精度及高重复定位精度,广泛应用于焊接、喷涂、搬运、码垛、装配等结构化生产环节。
🔷协作机器人兼顾安全性与灵活性,可实现与人安全交互与协同作业,有效降低作业风险,目前已广泛应用于汽车及零部件、3C电子、半导体、新能源、家电等行业,可执行设备运维、物料取放、螺丝锁付、机床上下料、质量检测等任务。
🔷SCARA机器人精度高、体积小、灵活性强,多用于3C电子、LED、玩具钟表、机械密封等领域,承担点胶、涂胶、装配检测、搬运上下料、钻孔、焊锡等工序。
🔷并联机器人(又称“蜘蛛手机器人”)刚度高、速度快、精度高、承载能力强,广泛应用于食品、医疗、化工、电子等行业,成为实现产品分拣、装箱等高速操作的主力机型。
🔷移动机器人与移动协作机器人(AGV/AMR+协作机械臂)承担车间物料转运、跨工序作业,覆盖半导体、机床加工、3C电子、日化制造等高需求场景。
🔷巡检机器人以轨道式、履带式、足式、轮式、无人机等多种形态,服务于工厂设备、油气场站、煤炭矿区、输变电站、轨道交通、IDC机房等场景的智能化巡检。
如今,在智能物流场景,有箱式机器人、攀爬机器人等多种形态;在大型设备焊接、打磨、抛光等领域,还有磁吸附爬壁机器人;在海洋工程、能源运维、水利市政、渔业养殖、水下考古等领域,水下机器人承担着监测、探测、检修、打捞等关键水下任务;在消防、防爆领域,有多种类型的特种机器人;在医疗行业有专用的手术机器人;在酒店等行业,服务机器人早已上岗,有成熟的应用。甚至在战场上,已出现战斗机器人。而轮式的类人形机器人也已在物料搬运、分拣等场景逐步投入使用。未来,双足人形机器人在工业场景的应用,应当聚焦危险、枯燥、高污染和高重复的场景。
业内早已形成共识,普遍认为未来机器人产业将呈现多形态协同发展的格局。例如,国家智能制造专家委员会委员谢兵兵近日就指出,人形机器人作为研究平台价值巨大,但在真实的工业场景中,AGV、四足机器人等多元形态将共存,企业需结合实际需求合理选择识别。
04
产业实践:主流厂商加速布局“多形态”
市场是检验技术与趋势的试金石。在“多形态协同”的业界共识下,越来越多的主流厂商正在用行动印证方向,将多元形态从概念推向落地。
例如,作为具身智能领域的独角兽企业,智元机器人并未局限于双足人形机器人研发,而是同步布局轮式人形机器人、商用清洁机器人与四足机器人,实现不同形态机器人的协同适配。
优艾智合、越疆科技等厂商则明确将“一脑多态”作为核心布局方向,以统一智慧大脑赋能不同形态机器人,实现智能协同,推动从单体智能走向群体智能。
埃斯顿、新松、埃夫特、拓斯达、翼菲科技、节卡机器人、阿童木机器人等工业机器人厂商纷纷布局轮式/双足人形机器人产品,核心目的也并非替代现有产品线及成熟方案,而是与六轴工业机器人、协作机器人、SCARA机器人、并联机器人、移动机器人等现有产品形成能力互补,进一步补齐泛场景适配能力。
05
结语:多形态并存,协同走向智能时代
我们不需要一个外形与行为高度拟人的“科技花瓶”,更应摒弃非理性的“人形崇拜”。未来的机器人产业,必然走向多形态并存、协同发展的道路,这是技术、商业、场景等多重因素共同作用的结果:
技术层面,双足人形机器人的核心瓶颈短期内难以突破,无法满足全场景多样化需求;商业层面,“场景适配、成本效益优先”的“进化论”路径更符合企业盈利与规模化落地目标;场景层面,工业、物流、家庭等场景需求差异显著,单一形态难以覆盖全场景,唯有多形态协同才能满足核心需求,真正解决问题。
机器人产业的发展,从来都不是“模仿人类”的竞赛,而是“形态服务于功能”的理性探索。可以预见,未来将不会是双足人形机器人独霸天下的局面,而是形态、功能各异的机器人在各自的擅长的场景中“发光发热”,各司其职、优势互补,成为人类生产生活中不可或缺的工具与伙伴,共同推动智能时代加速到来。
