

自动驾驶中的纯视觉技术验证与智能交通沙盘

自动驾驶中的纯视觉技术验证与智能交通沙盘的结合,是一个极具前瞻性和实用性的研究方向。纯视觉技术,作为自动驾驶的四大核心技术之一,主要依赖摄像头等传感器来感知和理解周围环境,为车辆提供决策依据。而智能交通沙盘,则是一个模拟真实交通环境的平台,可用于测试和验证自动驾驶系统的性能。
智能交通沙盘则可以为纯视觉技术的验证提供一个真实且可控的环境。在沙盘中,可以模拟各种复杂的交通场景,如拥堵路段、交叉口、行人横穿马路等,以测试自动驾驶系统在不同场景下的表现。同时,沙盘还可以方便地调整交通流量、车辆速度等参数,以模拟不同的交通状况,从而全面评估自动驾驶。

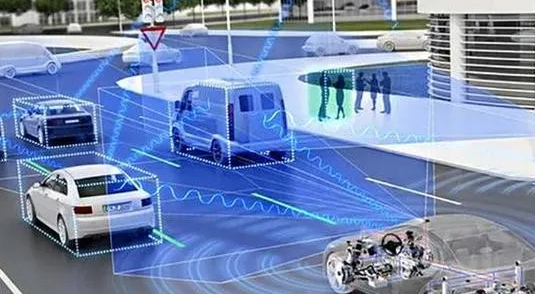
自动驾驶中的纯视觉技术验证,是指通过摄像头和其他视觉传感器来检测、识别和解释周围环境,而不依赖于雷达或激光雷达(LiDAR)传感器。这种技术主要模仿人类驾驶员的视觉感知能力,通过深度学习算法处理图像和视频数据,实现对道路、车辆、行人、交通标志和其他重要元素的识别和分类。
将纯视觉技术验证与智能交通沙盘结合,意味着在沙盘环境中使用纯视觉感知技术来测试自动驾驶车辆的感知能力。这样做的好处包括:
安全性:在模拟环境中测试自动驾驶系统可以确保测试的安全性,避免在实际道路测试中可能发生的危险情况。
可重复性:沙盘环境可以重复模拟相同的场景,使得测试结果具有更高的可靠性和可重复性。
灵活性:沙盘测试环境可以灵活地模拟各种交通场景和突发情况,有助于全面验证自动驾驶系统的感知能力。
成本效益:相比于在实际道路上测试,沙盘测试可以节省成本,并且可以全天候进行,不受自然环境和天气条件的限制。
在进行这种结合测试时,通常需要以下几个步骤:
设计和构建智能交通沙盘,确保其能够模拟真实的交通环境和场景。
开发和训练纯视觉感知算法,使其能够识别和处理沙盘中的各种交通元素。
在沙盘环境中对自动驾驶系统进行测试,收集数据并分析其性能。

根据测试结果调整和优化视觉感知算法,提高自动驾驶系统的感知能力和安全性。
重复测试和优化过程,直到自动驾驶系统在沙盘环境中表现出满意的性能。
这种结合测试的方法对于推动自动驾驶技术的发展和商业化具有重要意义,有助于确保自动驾驶系统的安全性和可靠性,为最终实现自动驾驶的商业化应用奠定基础。
