


新型可穿戴机器人未来走向何方?
从一般定义上来看,外骨骼机器人是指穿戴在使用者身体外部的一种智能机械结构,可将人体感觉、思维、运动等器官与机器的感知系统、智能处理中心、控制执行系统相结合,从而达到改善人体物理机能及提高身体素质等目的,其本质是一类可实现人机结合的可穿戴式机器人。
它不再需要金属支架作为整个身体的重量支撑,而是采用仿生碳纤支架、轻型织布、极小型驱动装置等轻巧结构,来针对目标肌肉,使之成为一套轻便柔软、对行动没有附加限制的轻型设备。
01.
外骨骼机器人的应用方向
外骨骼机器人发源于20世纪60年代,伴随着柔性外骨骼技术的发展,外骨骼广泛应用于医疗康复、工业等领域。中国对外骨骼的研究约始于2000年,随着机器人技术的飞速发展以及行业接受度的不断提高,中国从2018年以后进入快速商业化阶段。
与国外市场相比,国内外骨骼机器人行业起步较晚。从2018年6月国家药监总局将首个NMPA注册认证发给大艾下肢外骨骼机器人起,中国医疗康复外骨骼机器人正式开启商业化阶段。
目前中国针对残疾人以及中风、偏瘫患者等肢体运动障碍患者进行康复训练的理疗师数量严重不足,市场缺口巨大,而巨大的缺口可以通过外骨骼机器人得到满足,因此,医疗康复市场对外骨骼机器人的需求将是巨大的。
外骨骼机器人涉及机械、控制、传感器等高难度学科领域,是多项高新科技技术的集成。在仿生原理、人体工程学设计以及信息控制技术等基础上,外骨骼机器人还涉及生物运动学、机器人学、信息科学、人工智能等学科知识。外骨骼机器人将人类智能与外部机械动力装置相结合,通过提供力量辅助增强人类行走运动及重物负荷等能力,既可为力量不足的使用者提供医疗康复和运动支撑等功能,亦可帮助使用者完成负重搬运等任务。
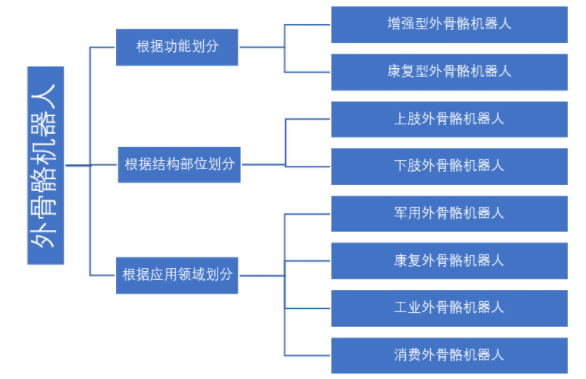
外骨骼机器人的分类
02.
外骨骼机器人的发展趋势
外骨骼机器人技术系统尚仍存在缺陷,如下肢外骨骼机器人重心不稳、响应速度慢等。同时还存在环境适应性与运动灵活性差,难以灵活适应各类使用者,以及与使用者预期动作不符合等问题。
因此,外骨骼机器人发展的主要趋势主要围绕以下几个方面:
1.柔性化
传统刚性材料所制成的外骨骼机器人对人体安全具有潜在威胁,且缺乏在特定环境下进行作业的适应性与灵活性,促使外骨骼机器人企业对机器人的柔软性展开研究。
柔性外骨骼机器人主要由柔软材料组成,如液体、凝胶、硅树脂等,可与生物组织和器官的灵活性以及弹性相匹配,可在复杂环境下进行灵巧的运动,完成高难度任务。
柔性外骨骼机器人模拟生物柔性和灵活性的仿生技术,弥补了刚性外骨骼机器人在安全性、适应性及灵活性等方面的不足,因此可促进外骨骼机器人在医疗以及工业领域的高速发展。
2.人机一体化
随着感知计算技术和传感系统发展日益成熟,机器人研发方向从人机协作逐步迈向人机融合,逐渐成为人类身体的一部分。
具体而言,即从依赖硬件传感器收集人体生物电信号,发展成为将硬件客观数据与人体主观信息相结合的新型信息输入方式。信息接收后,经过机器的计算能力与人体的思维能力进行信息处理,再通过机器的算法能力与人体的决策能力互相协调、优化判断后进行智能输出,将人体智能与机器智能相融合,从单向输出转为双向互动,从而形成更高效的人机一体化智能科学系统。
3.驱动模式的转变
从刚性地支撑身体重量,到驱动人体骨关节,再到驱动人体肌肉。人体肢体运动障碍或运动能力变弱,本质上可能是由某一肌肉/肌肉群的功能性衰退造成的,若采用直接对目标肌肉进行辅助的驱动形式,无疑是更高、更符合人体生物力学的。
因此,通过驱动“附着”在人体肌肉/肌腱外表面的人工肌肉线束,实现对目标肌群的精准辅助与肢体机能的有效增强。
03.
感知人体的肌肉外甲
伴随着人工智能算法(机器学习)、柔性材料设计、人体生物力学等融合发展,肌肉外甲作为一种新型可穿戴外骨骼机器人,完全区别于刚性“外骨骼机器人”通过支撑身体重量进行辅助的技术理念。
肌肉外甲通过自主学习每一位穿戴者的人体结构和实时步态,补足或增强对应肌肉力量,助力身体运动。它不再需要金属支架作为整个身体的重量支撑,而是采用仿生碳纤支架、轻型织布、极小型驱动装置等轻巧结构,来针对目标肌肉,使之成为一套轻便柔软、对行动没有附加限制的轻型设备。
肌肉外甲表面设有传感器,并配有操控台。当使用者穿上肌肉外甲后,传感器能实时测量其肢体动作,将测量数据传回系统中。算法会对数据进行学习,预判穿戴者的意图,并根据计算结果,提供和肌肉纤维平行的外部助力,帮助穿戴者更好地完成肢体动作,从而提高穿戴者动作的完成度、稳定性和效率。
与机械臂、无人机、移动车等机器人不同,肌肉外甲是紧密贴合在肢体表面,与人同体,实现协同运动,因此具有更高的人机融合度,是人机共融技术的重要载体之一。但这种特殊的作业方式给科研人员的技术研究带来了众多挑战。
人与肌肉外甲作为一个紧密的整体,需有主次之分,才能有序运行。肌肉外甲需要主动、正确地感知、理解、适应人体的运动行为。例如,人当前是否需要助力等。错误地感知当前运动环境与理解人体行为意图,会致使机器人在行为决策与规划方面出现偏差,导致结果适得其反。简而言之,就是人会感到不舒服、被束缚、易疲劳。而提升机器人对人体运动状态的快速适应能力,是减少这种非期望现象发生的关键,也是当今外肌肉机器人研究的热点与难点。
